利用图片进行快速重建
在这个模式下,软件使用我们开发的图像处理算法计算精确的相机位置及姿态,位姿估计的数据和已存储的GPS信息将进行联合优化,从而使图片转化为地图。
主要操作包括下列步骤:创建工程、选择图片、设置相机参数、计算、输出结果。
1.创建工程
- 点击菜单
文件->新建或Ctrl-N开启一个新的工程向导。 - 点击
工程名称并选择工程文件夹。 - 选择工程类型为
Ortho, 目前暂不支持Oblique。 - 数据来源选择
图片。 - 点击
下一步来进入下一向导页。
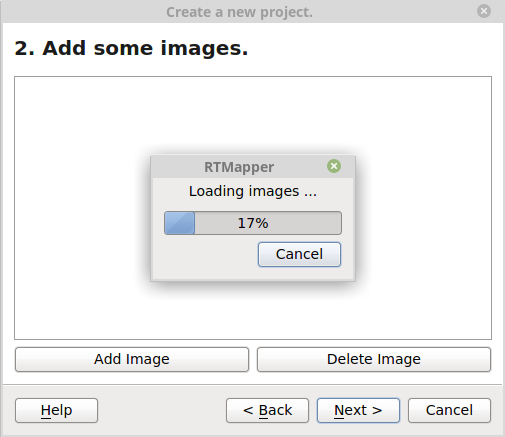
2.选取图片
- 点击
添加图片来向工程中添加图片。如果有质量不好的图片或您不满意的图片,您可以勾选并点击删除图片来移除它们。 - 当图片完全加载成功,且确认无误后,点击
下一步。
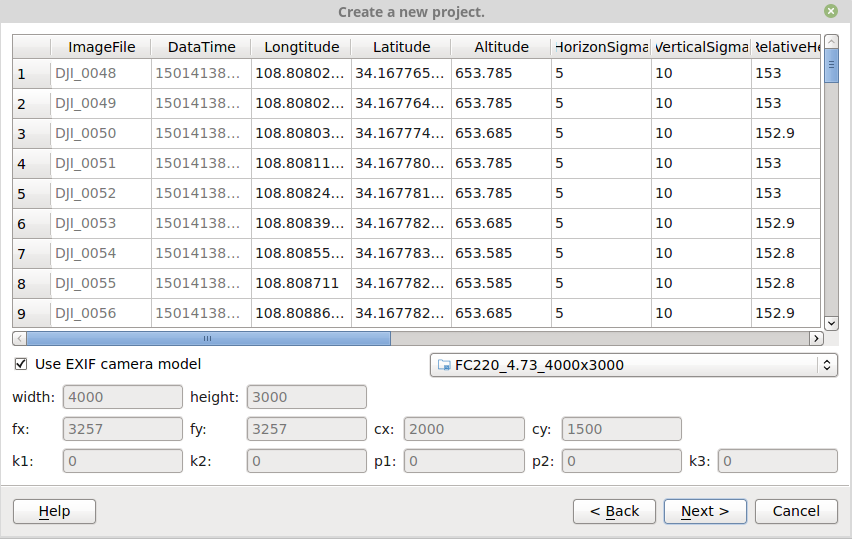
3.设置相机参数
- 在当前窗口中,您可以看到每一项图片属性:文件名、拍摄日期/时间、经度/纬度、高度等等。
- 如果相机参数有误或EXIF信息中并未包含相机参数,请自行设置相机参数。
- 各个相机参数的意义可以参照此链接。
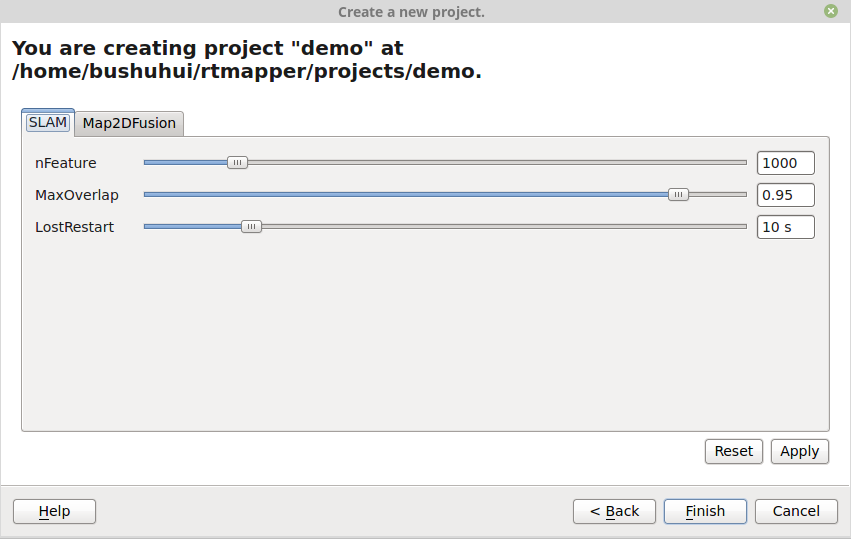
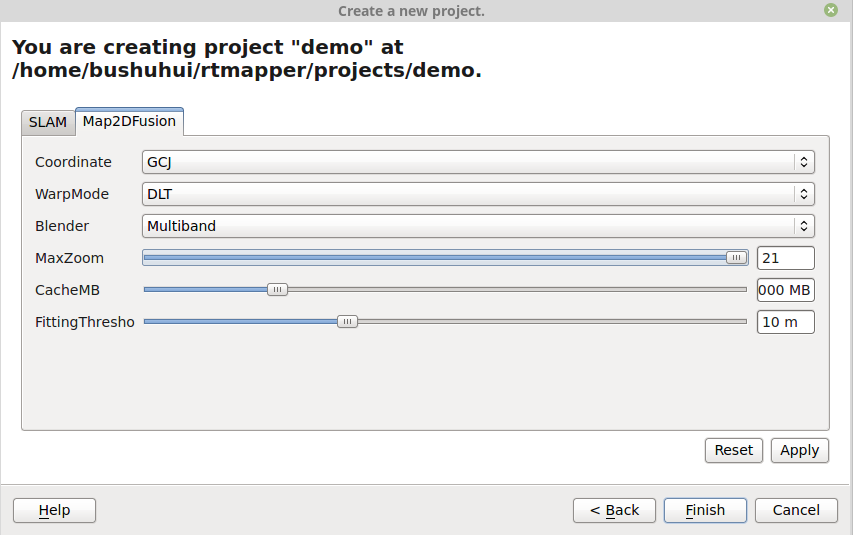
4.设置重建选项
在设置完相机参数后,您需要设置工程选项。
5.运行过程
- 点击
执行按钮(向右三角型箭头) 来开始运行。 - 运行过程的输出将显示在窗口底部。
- 运行状态将显示在状态面板上。
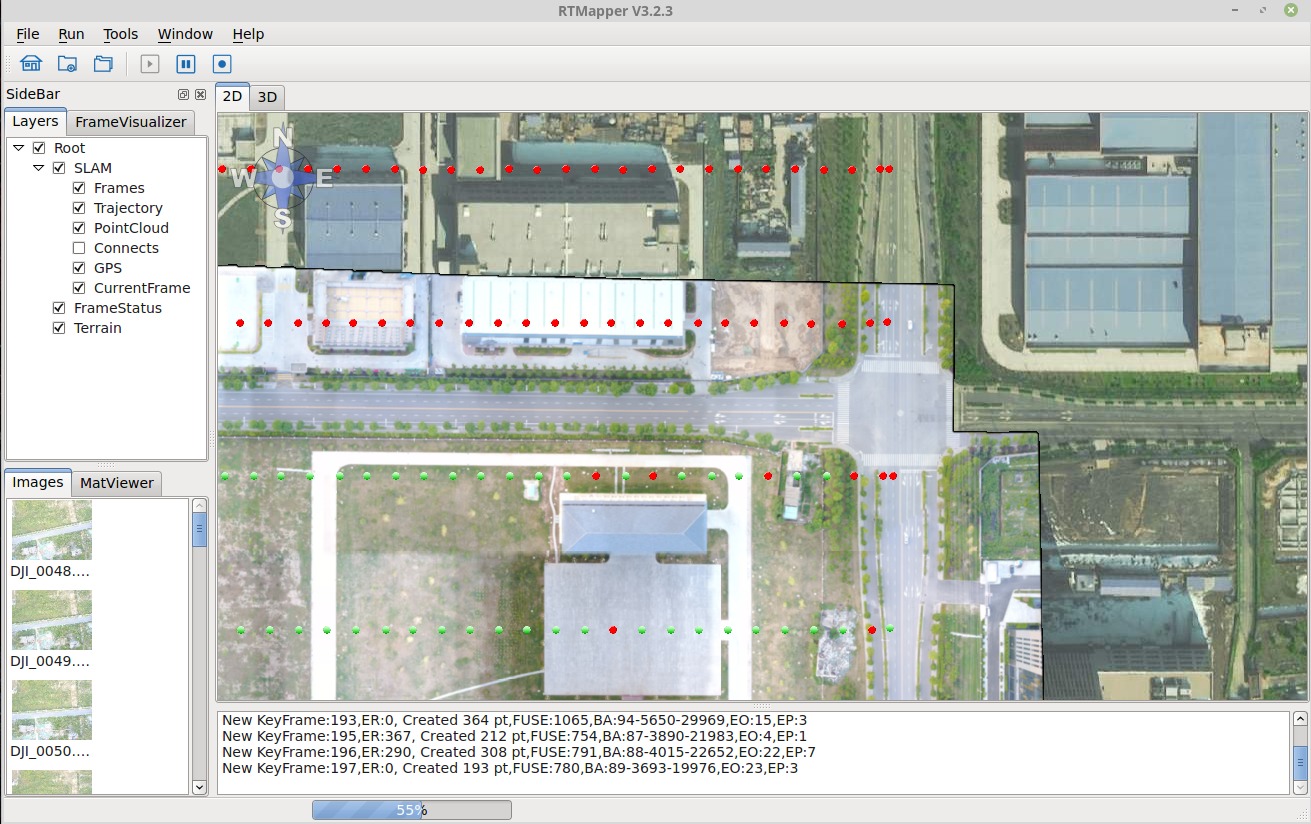
点击工具栏上的开始按钮以执行计算过程。

2D运行结果视窗显示生成的地图。
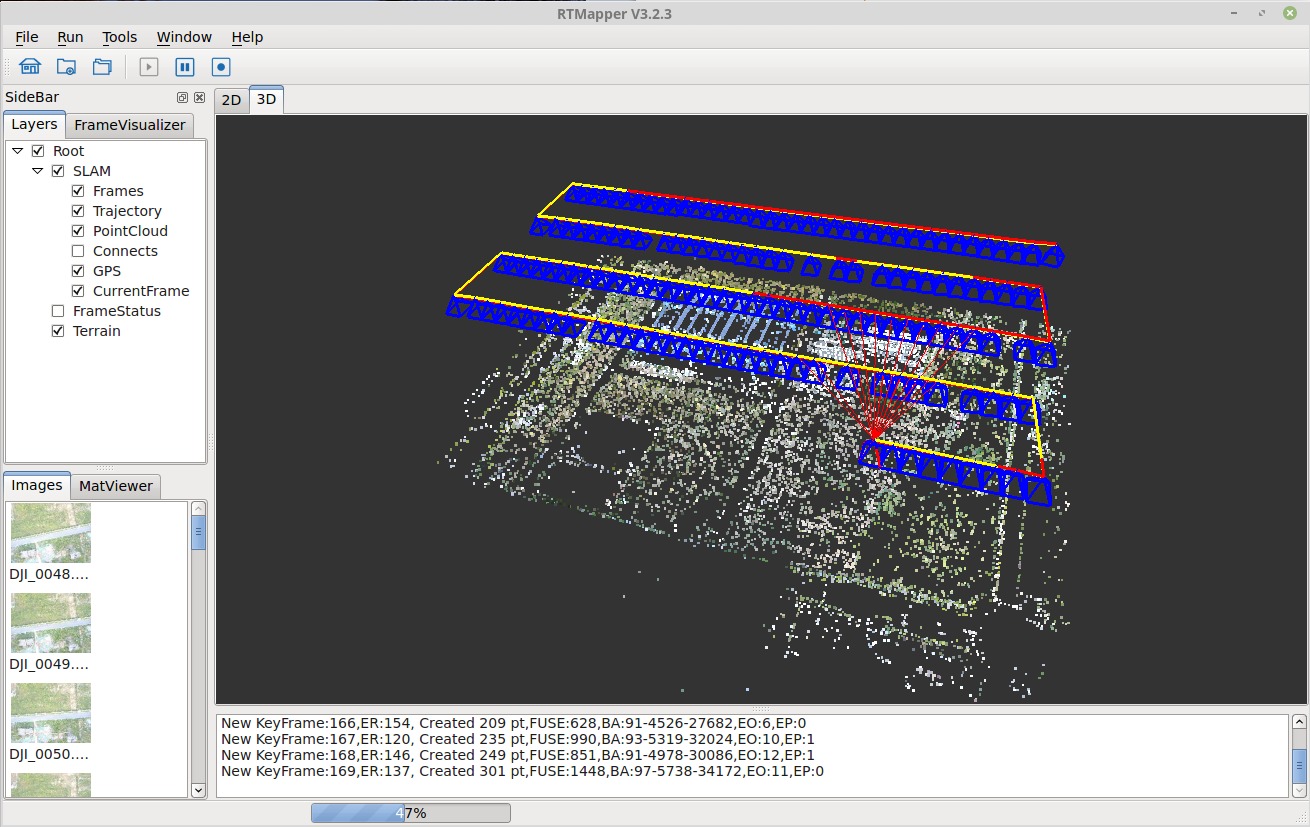
3D运行结果视窗显示相机位姿及点云。
6.输出结果
1.点击菜单 文件 -> 输出 来输出结果。
2.选择您需要输出的文件格式。
目前本软件支持以下三种输出格式。 稀疏点云(.ply):系统运行过程中计算的点云数据。 正射影像(.kml):具有kml描述的PNG图像。 * 正射影像(.tif):嵌入了几何信息的TIFF图像。