RTMapper桌面版
本软件主要功能为快速或实时的处理获取到的图片和视频序列,需在台式机或笔记本电脑上运行。
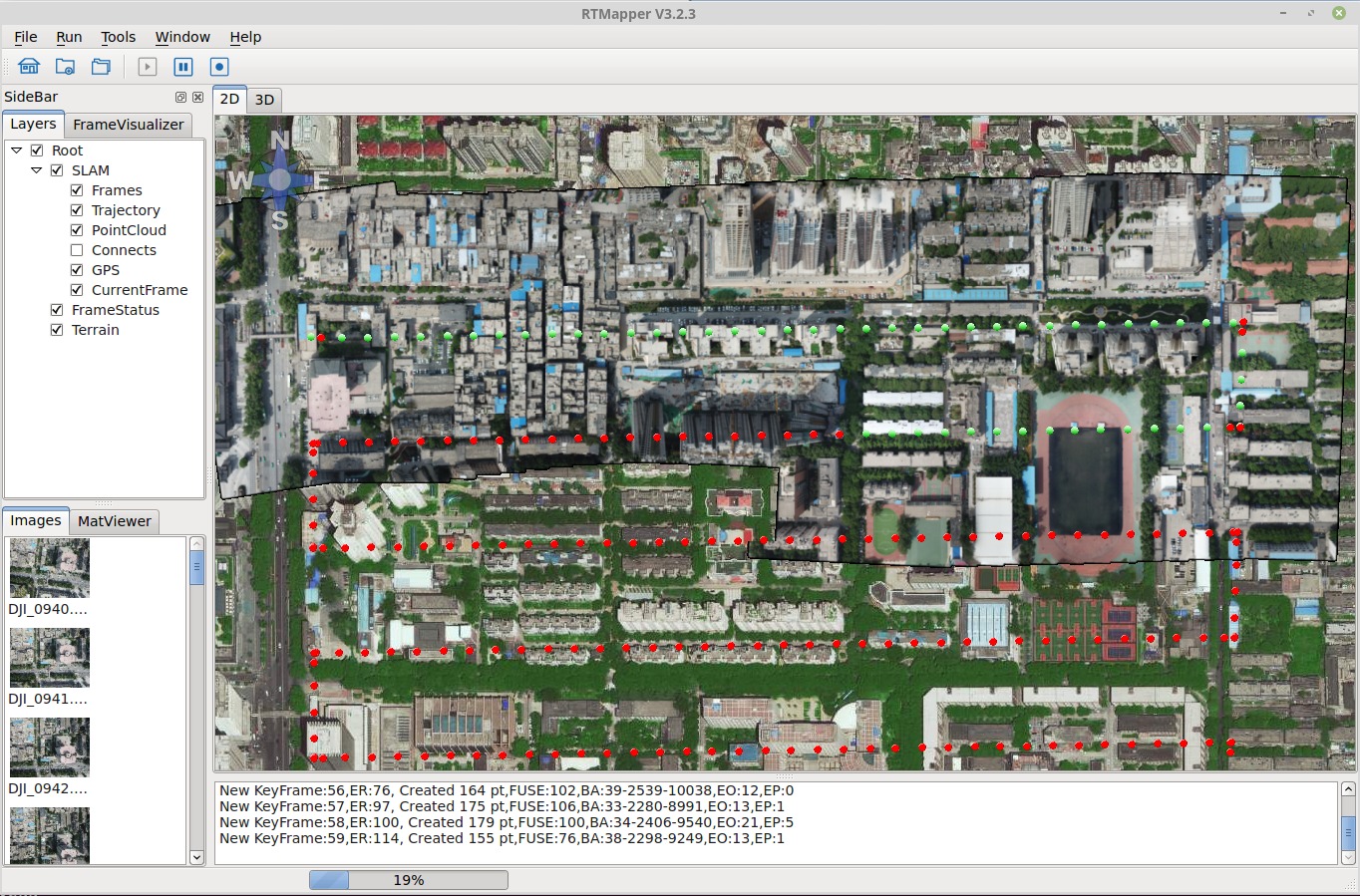
主窗口
本软件的GUI组件包括如下内容:
- 菜单栏:
- 工具栏:
- 输出窗口:显示运行结果。
- 侧边栏:控制可视化选项,以及对当前图片的一些处理。
- 状态面板:显示运行状态。
工程选项
当创建新的工程或载入已有工程时,您需要进行计算相关的选项设置。
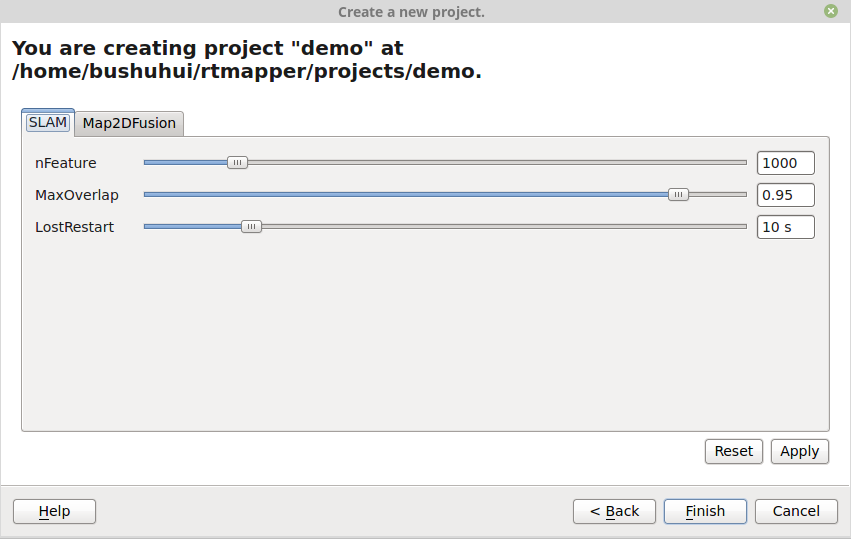
SLAM相关选项
特征数量:每一帧提取的特征数量,默认值为1000。最大重叠率:相邻帧的最大重叠比率,默认值为0.95。重启时间:当跟踪丢失后,多久重启SLAM计算,默认值为10秒。
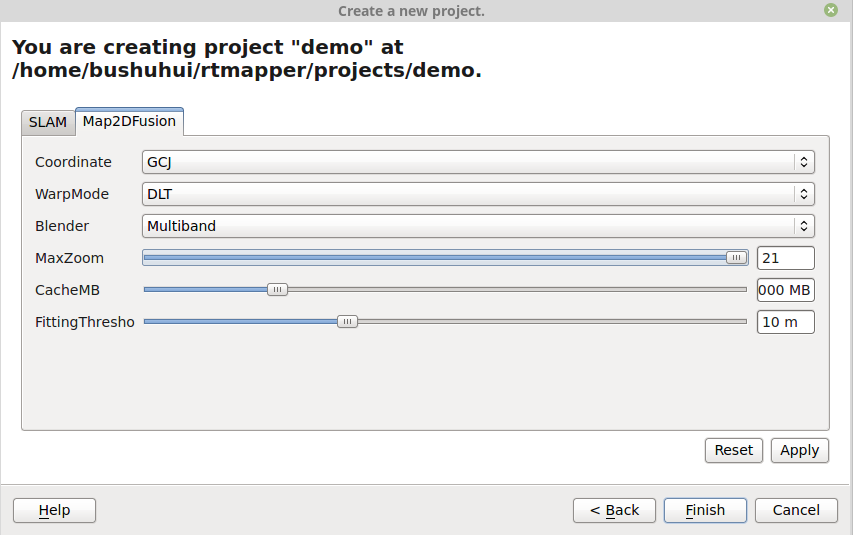
Map2DFusion选项
坐标系:可选设置包括GCJ:谷歌、高德地图使用的坐标系。(默认设置)GPS:WGS84坐标系。BAIDU:百度地图使用的坐标系。
Warp模式:DLT:直接线性变换方法。(默认设置)MDLT:多重直接线性变化方法。
Blender:多波段:使用自适应权重的多波段算法,来将图片融合成地图。(默认设置)朴素:朴素融合算法。接合多波段:使用接合和多波段算法。
最大缩放级别:生成的地图的最大缩放级别。默认值是19(分辨率为0.2986米/像素),最大值是21(分辨率为0.0746米/像素)。缓存空间:地图瓦片可使用的缓存大小,单位为Mb。默认值是1000Mb。拟合阈值:用于拟合大地平面的阈值参数。默认值为20m。
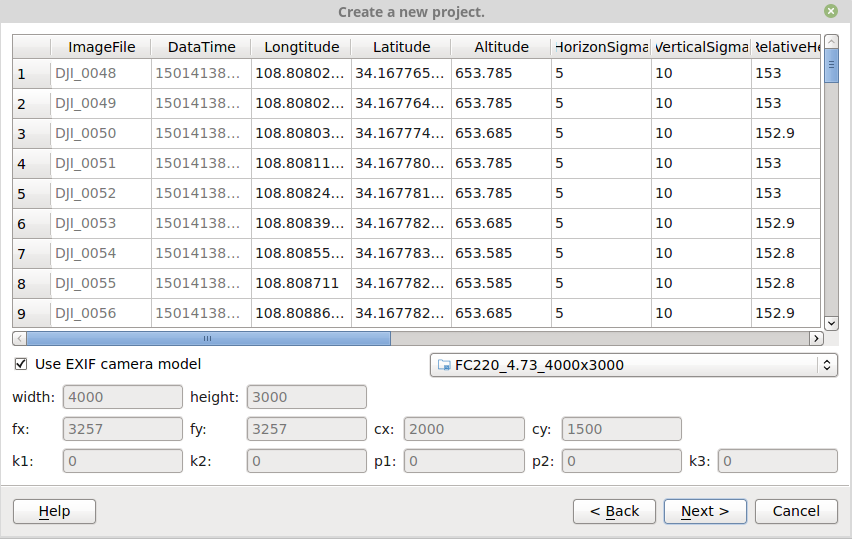
相机参数
本软件使用 OpenCV相机模型. 更多详细的信息,请参照此处.
宽度,高度: 以像素为单位,图片行和列的数目。fx,fy: x方向和y方向的焦距。cx,cy: 像素坐标系上原点的平移量。k1,k2,p0,p1,k3: 径向畸变。