RTMapperDesktop
This program running on desktop/laptop computer for fast/real-time processing captured photos and video.
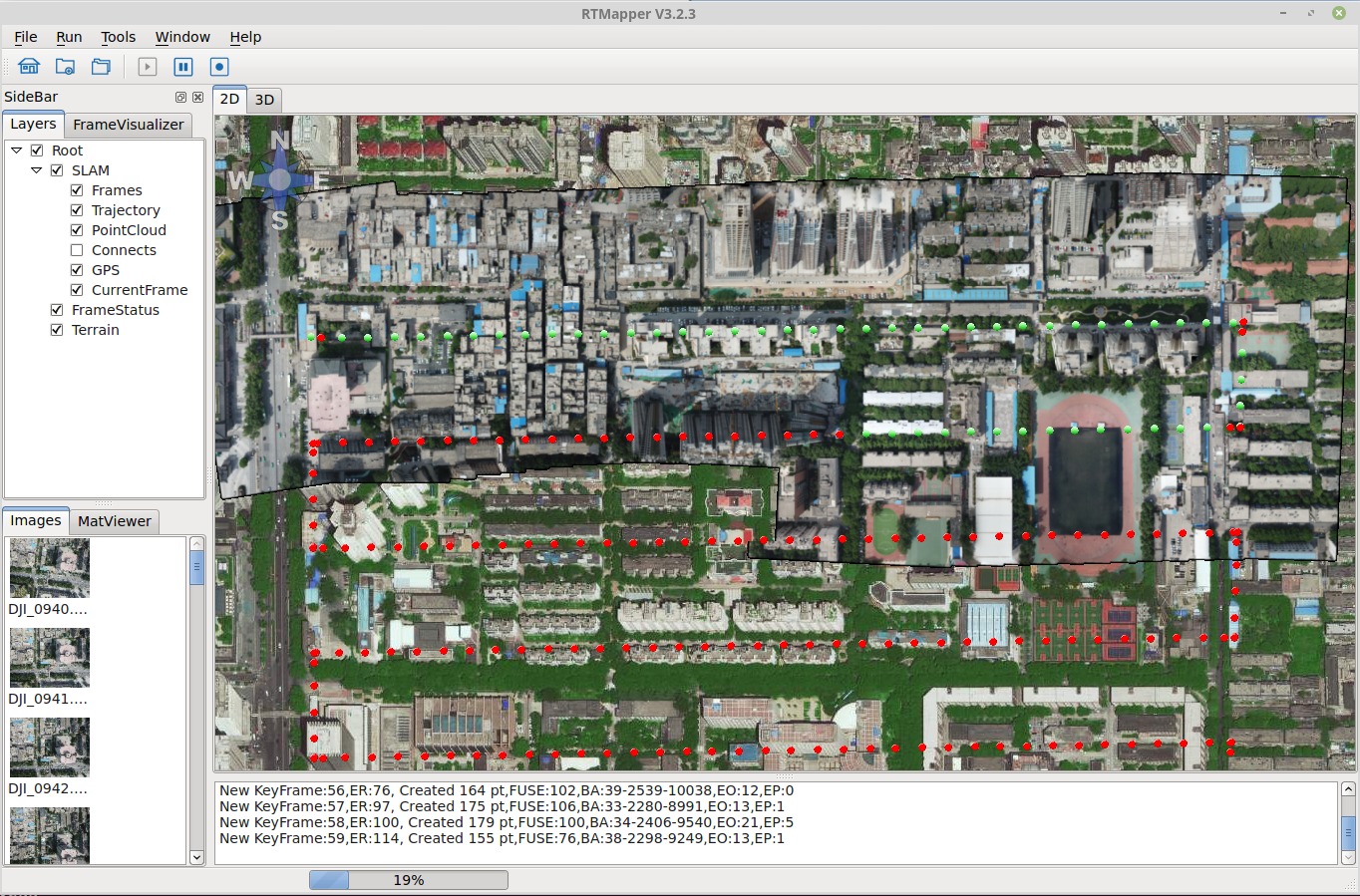
Main window
This software has following GUI components:
- Menu bar: control the operation
- Tool bar: quick access the operation
- Log window: display the running status
- Side bar: control the visualization options, and current images
- Status pannel: display processing status
Project options
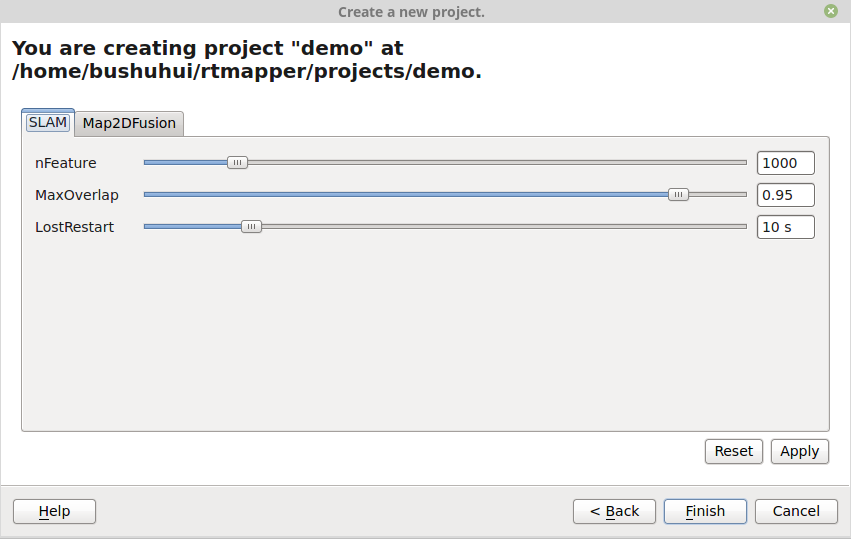
When creating the project or load the project, you can set the compution options.
Options for SLAM:
nFeature: Extracted feature number for each frame, default value is 1000.MaxOverlap: Maximum overlap between consequative frames, default value is 0.95.LostRestart: Determin how long the SLAM restart when lost tracking, default value is 10 seconds.
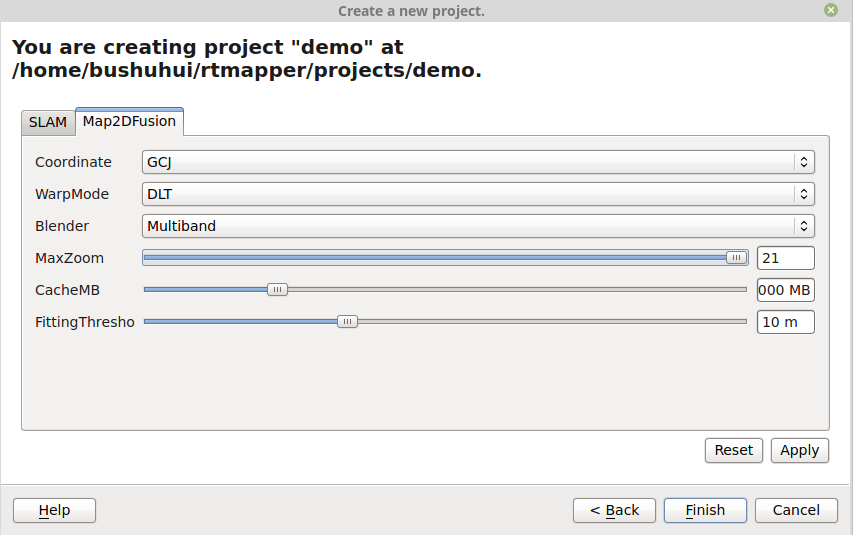
Options for Map2DFusion:
Coordinate: aviable settings includeGCJ: Google, Gaode map's coordinate (default)GPS: WGS84 coordinateBAIDU: Baidu map's coordinate
WarpMode:DLT: Direct linear transform method (default)MDLT: Multi-DLT method
Blender:Multiband: Use adaptive weighted multiband to fuse images to photo (default)Simple: Simple fusing alogirhm.SeamMultiband: Use seam and multiband algorithm.
MaxZoom: Maximum zoom level for generating map. Default value is 19 (resolution is 0.2986 m/pixel), and maximum value is 21 (resolution is 0.0746 m/pixel).CacheMB: How man tile cache can be used, the unit is MB. Default value is 1000 MB.FittingThresho: Threshold for fitting ground plane, default value is 20 m.
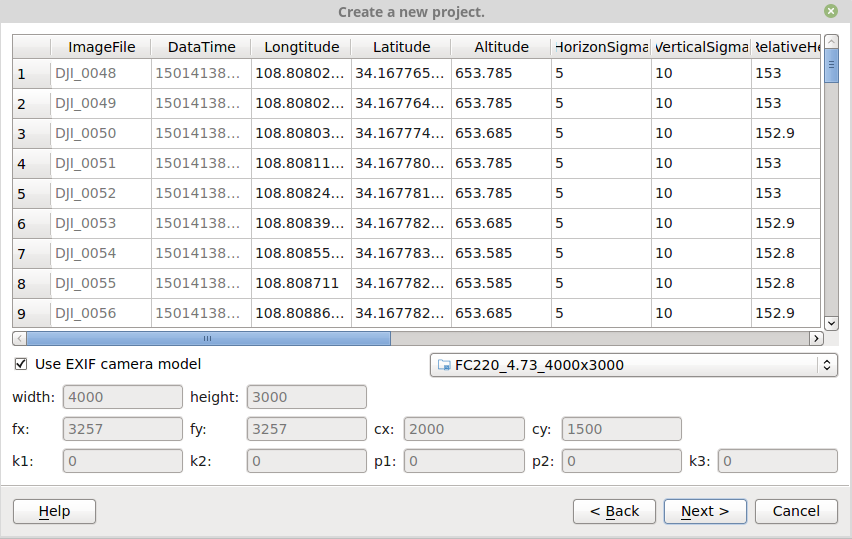
Camera parameters
This software use OpenCV's camera model. For more detailed description you can found them at here.
width,height: The pixel size in column and row.fx,fy: The focal length in x and y direction.cx,cy: The principle center in x and y direction.k1,k2,p0,p1,k3: radial distortion parameters.